
Share
Applied Sciences, Free Full-Text

How to choose the most natural path for a humanoid robot? The
Frontiers Gait Optimization Method for Humanoid Robots Based on

a) The humanoid robot hrp -2 [18]. (b) Example of varied terrain

Figure 1 from Bipedal Hopping: Reduced-Order Model Embedding via

The simulated running of the humanoid robot, DU-RUS, as a result

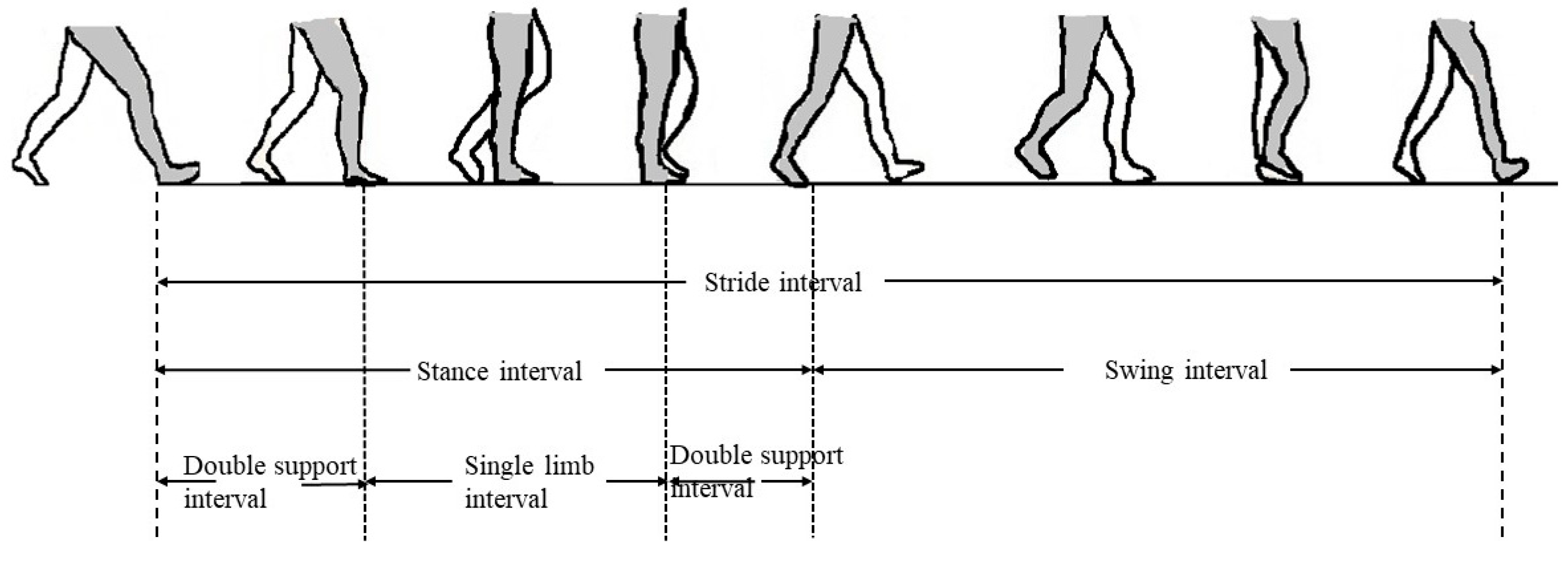
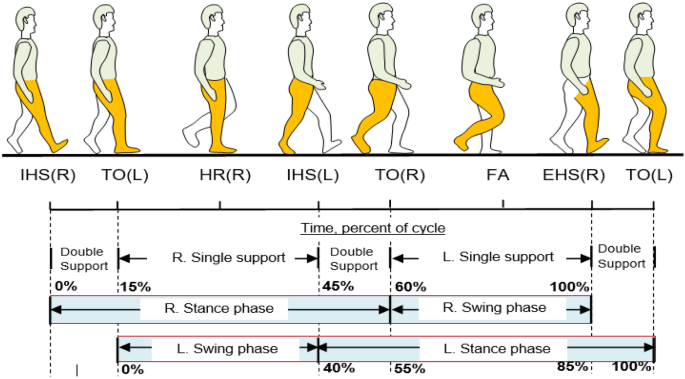
Heel-strike and toe-off motions optimization for humanoid robots

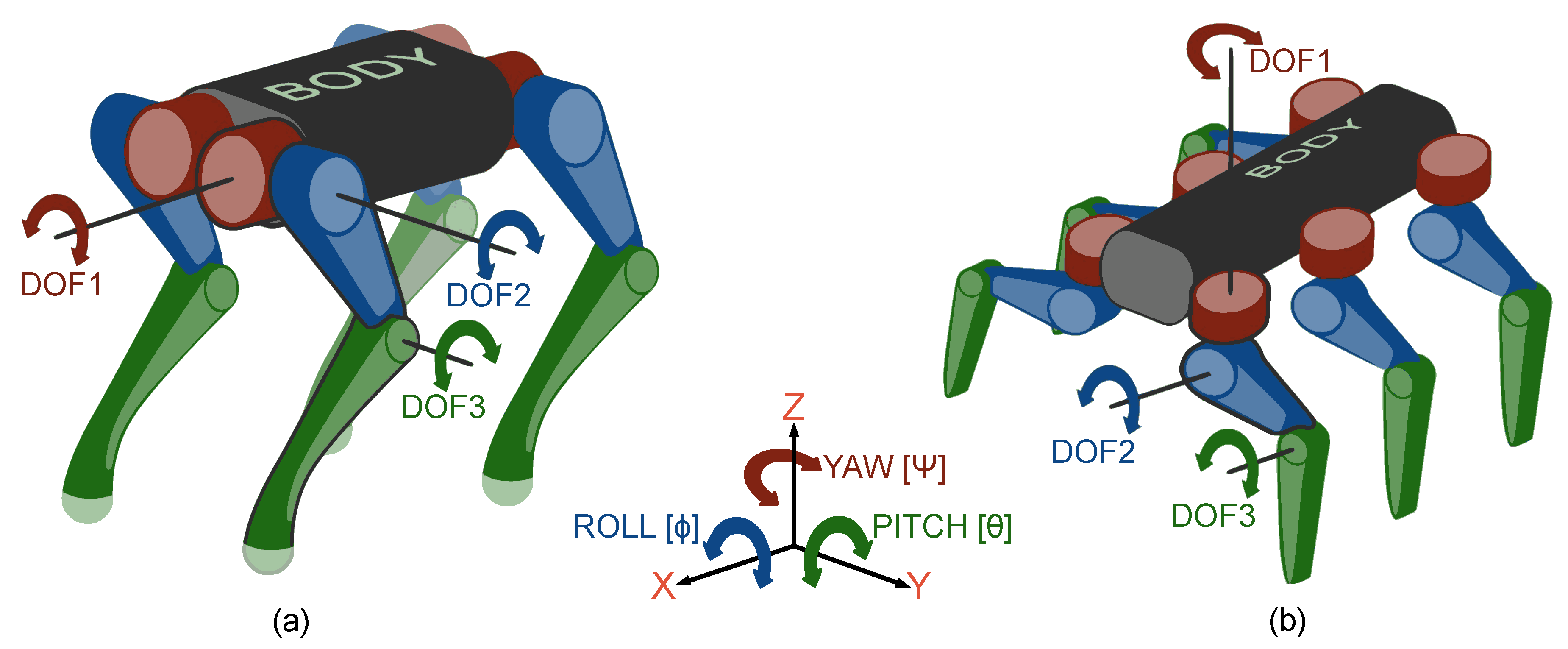
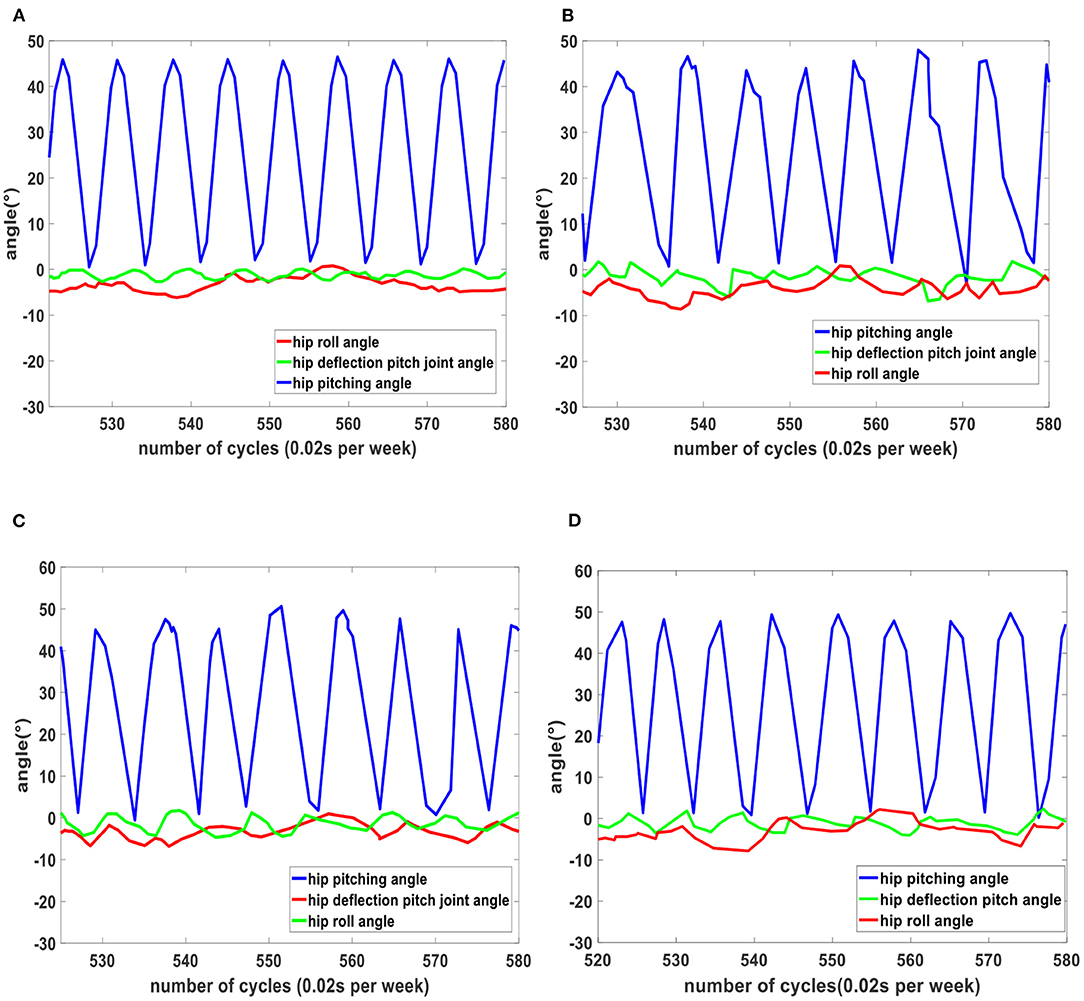
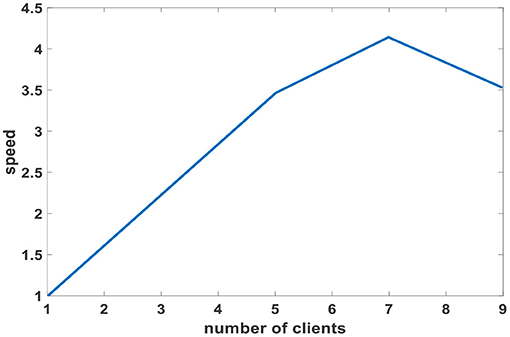
Smart Gait: A Gait Optimization Framework for Hexapod Robots

Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on
Related products

You may also like


