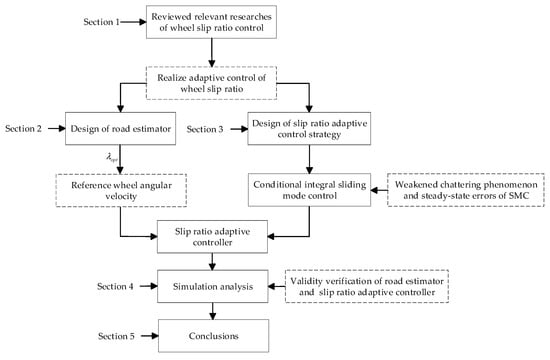
In order to solve the adaptability problem of acceleration slip regulation for distributed drive electric vehicles, a slip ratio adaptive control strategy based on wheel angular velocity is proposed. The principle of road estimation algorithm based on the Burckhardt tire model is analyzed, and an improved estimation principle for optimal slip ratio is designed to improve the speed and accuracy of optimal slip ratio estimation. A slip ratio control strategy based on a conditional integral sliding mode control is designed, and its stability is proven. To make the slip ratio control strategy have better practicability, the slip ratio control strategy is combined with the road estimation algorithm, and the control variable of the slip ratio adaptive control strategy based on a conditional integral sliding mode control is redesigned to obtain a faster vehicle dynamic response. Finally, the effectiveness of the designed road estimation algorithm and the slip ratio adaptive control strategy is verified by simulation of acceleration on joint road and split road. Results show that the designed road estimator can obtain the road adhesion coefficient and optimal slip ratio quickly and accurately; the slip ratio adaptive controller, based on a conditional integral sliding mode control, can maintain the wheel slip ratio near the optimal slip ratio and reduce the steady-state error of the wheel slip ratio.

WEVJ December 2023 - Browse Articles
Technical Feasibility of Heavy-Duty Battery-Electric Trucks for Urban
WEVJ, Free Full-Text

WEVJ, Free Full-Text

WEVJ, Free Full-Text

World Electric Vehicle Journal An Open Access Journal from MDPI
WEVJ, Free Full-Text

WEVJ, Free Full-Text
WEVJ, Free Full-Text

Copper Busbar Coatings FAQs From Coating Systems, busbar







