A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

Simple model of walking over a single up- (or down-) step. (a) Body

4 Simple Hip Exercises to Correctly Power Your Walk

Simple Harmonic Motion ครูสิริลักษณ์

Margins of stability as a function of walking speed between 1.0 and

Cornell Ranger is an electrically-powered four-legged bipedal robot.

Margins of stability as a function of walking speed between 1.0 and
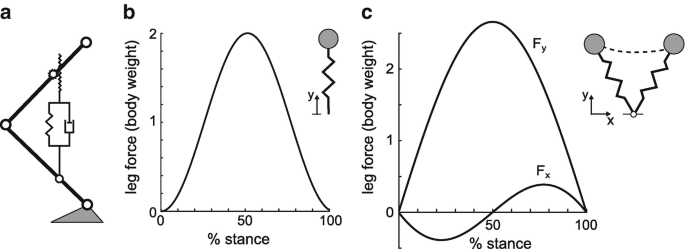
Gait Based on the Spring-Loaded Inverted Pendulum

PDF) A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

Cornell Ranger is an electrically-powered four-legged bipedal robot.

190194 PDFs Review articles in GAIT

A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

Gait Based on the Spring-Loaded Inverted Pendulum

Robotics, Free Full-Text

190194 PDFs Review articles in GAIT